世界初の宇宙帆船「IKAROS」が切り拓く太陽系大航海時代
その他宇宙分野
1 はじめに
「ソーラーセイル」は、宇宙空間でセイル(帆)を展開し、太陽の光の圧力を受けて宇宙空間を航行する宇宙帆船であり、燃料なしで推進力を得ることができる。このアイデア自体は約100年前からあり、SFやアニメでもよく登場する。しかし、これまで世界中で研究が進められているにもかかわらず実現されていなかった。
一方、「ソーラー電力セイル」は、セイルの一部を薄膜の太陽電池とすることで、ソーラーセイルに加え、太陽光発電も同時に行う日本独自のアイデアである。ソーラー電力セイルは光子加速により燃料を節約できるだけでなく、太陽から遠く離れた場所でも、大面積の薄膜太陽電池を利用して十分な電力を確保できる。JAXAは小型ソーラー電力セイル実証機「IKAROS(Interplanetary Kite-craft Accelerated by Radiation Of the Sun)」を開発し、世界で初めてソーラーセイルおよびソーラー電力セイルを実証することに成功した(図1)。
薄膜太陽電池で得られた大電力を用いて、高性能なイオンエンジンを駆動すれば、ソーラーセイルと合わせたハイブリッドな推進が実現でき、次世代の推進機関として広く応用が可能となる。JAXAでは、このコンセプトを踏まえ、ソーラー電力セイルによる外惑星領域探査計画を提案している。
本稿では、IKAROSのミッションおよびシステムの概要を説明し、開発・運用結果を明らかにする。さらに、次のソーラー電力セイル計画について紹介する。
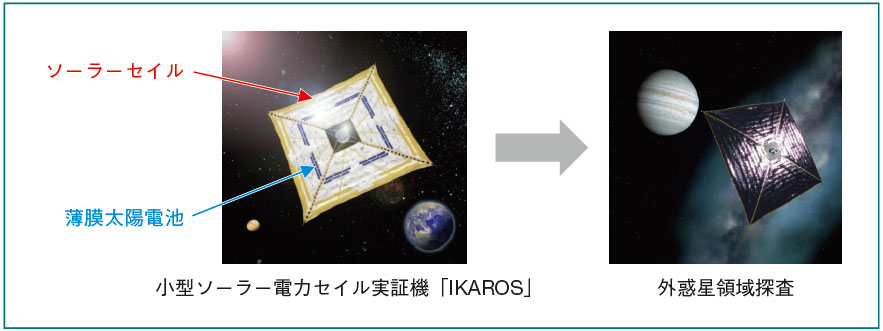
図1 ソーラー電力セイル計画
2 IKAROSのミッション
IKAROSは以下の4つのミッションによりソーラー電力セイルを実証した。いずれも世界初の快挙となった。
(1)大型膜面の展開・展張
海外では主として、マスト(支柱)を使って膜面を展開・展張する方式が検討されているが、セイルのサイズが大きくなるほどマストの重量も大きくなるという問題が発生する。そこでJAXAでは、数1000m2級の超大型膜面を宇宙空間で広げることを見据え、マストを持たずに遠心力を用いるスピン方式を考案した。ただし、地上での展開実験では空気抵抗と重力の影響を受け、これらを完全に除去することはできない。そこで、IKAROSにおいて、実際に宇宙空間で200m2の大型膜面を同じ方式で展開・展張して、減衰係数や圧縮剛性など、膜面の挙動に大きく影響を及ぼすパラメータを同定し、数値シミュレーションモデルを構築した。なお、スピン方式はソーラーセイル以外にもエアロブレーキ等のミッションで広く応用が可能である。
(2)薄膜太陽電池による発電
IKAROSではハーネスを含めた薄膜太陽電池の宇宙環境での発電性能を評価した。地上でも要素試験は可能であるが、薄膜発電システムとして総合的な評価は不可能である。なお、薄膜太陽電池は重量制約の厳しい超小型衛星がまとまった電力を確保するための手段になりえ、宇宙太陽光発電システムの電池にも適している。
(3)ソーラーセイルによる加速
太陽光の圧力は1AUにて、約5×10-6N/m2であり非常に小さい。空気抵抗や地球重力の影響を完全に排除できる深宇宙にて膜面の折り癖やしわ等の影響も含めた光子加速や膜面全体の運動をドップラーや軌道の変化により精度よく評価した。
(4)ソーラーセイルによる航行技術の獲得
膜面の操舵により光子加速の方向を変化させ、航法誘導制御を実現する技術や光子加速状態で軌道決定を行う技術を、実際に宇宙実証することにより獲得した。
(1)、(2)はミニマムサクセスクライテリア、(3)、(4)はフルサクセスクライテリアに相当するミッションである。図2にIKAROSのミッションシーケンスを示す。①IKAROSは種子島宇宙センターからH-IIAロケットにて金星探査機「あかつき」と相乗りで2010年5月に打ち上げられ、図3に示す金星直行軌道に投入された。②スピンによる遠心力を用いて大型膜面を展開・展張し、③薄膜太陽電池による発電を実証した。これでミニマムサクセス達成となり、数週間で実現できた。④膜面に太陽光圧を受けることでソーラーセイルとして加速し、⑤膜面の操舵により航法誘導制御を行った。ソーラーセイルの影響を評価するためには光子加速状態での軌道決定が必要であり、これも合わせて実現することでソーラーセイルによる航行技術を獲得した。これでフルサクセス達成となり、約半年間で実現できた。⑥ちょうどこの時期に金星をフライバイした。
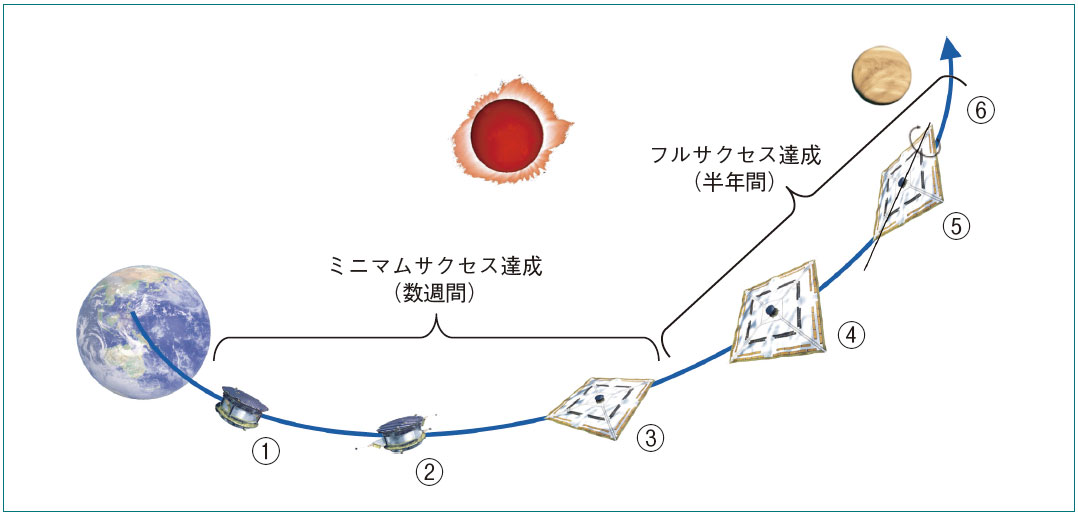
図2 ミッションシーケンス
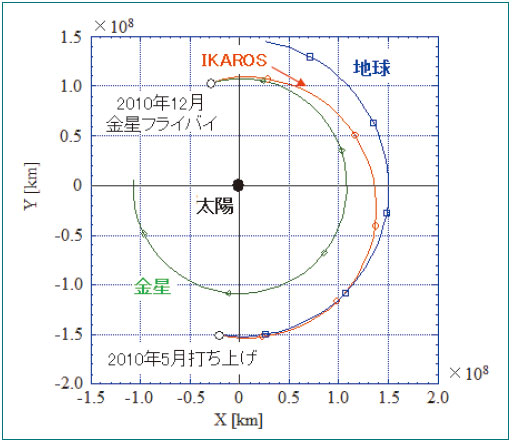
図3 IKAROS の軌道
3 IKAROSのシステム
3.1 IKAROSの開発方針
外惑星領域探査を実現するソーラー電力セイル探査機は開発リスクが大きいため、まずはフロントローディングという位置付けで、小型プロジェクトにてIKAROSを開発することとした。ソーラーセイルによる加速確認を行うには地球の重力・空気抵抗の影響を避けるため惑星間軌道への投入が必要であり、「あかつき」と相乗りにより急きょ実現することとなった。そのため図4に示すように計画開始から打ち上げまでわずか2年半で、コストは従来の科学衛星の1/10規模であった。この制約を考慮し、IKAROSは以下の方針で開発することとした。
(1)開発項目を極力ミッションの4項目に関連する部分に限定し、リソース分散リスクを回避した。
(2)ミッション系以外は他プロジェクト(M-Vロケット、LUNAR-A、DRTS、はやぶさ、あかつき等)の既存品・既開発品を多く採用した(図5)。
(3)十分なマージンを確保した設計とし、熱構造試験モデル(TTM、MTM)を省略した。総合試験の適切なタイミングで計3か月の予備期間を設けた。
(4)若手職員、学生が主体的に設計・製作・試験・運用を進めた(図6)。

図4 開発スケジュール
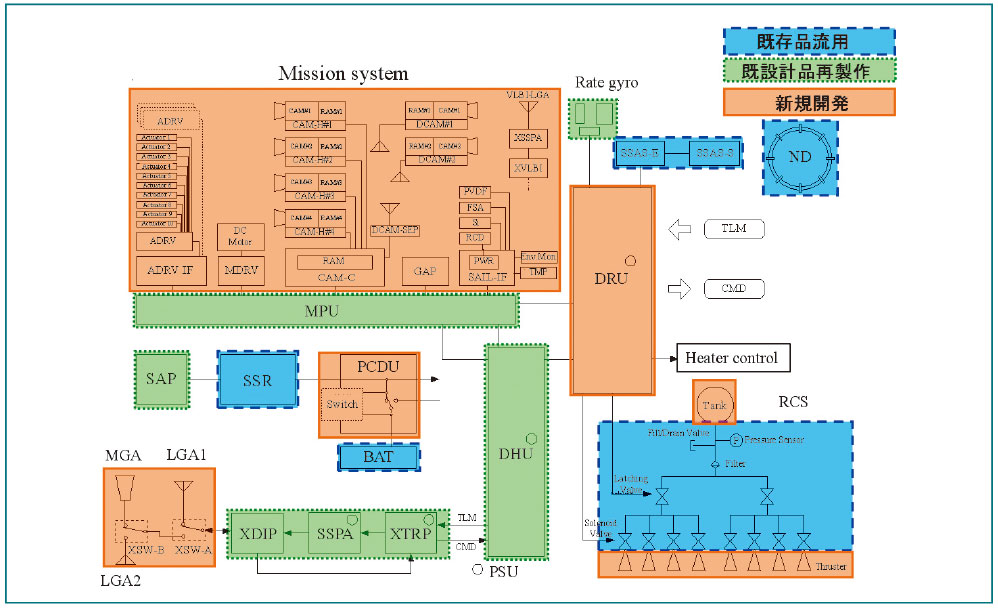
図5 システムブロック図
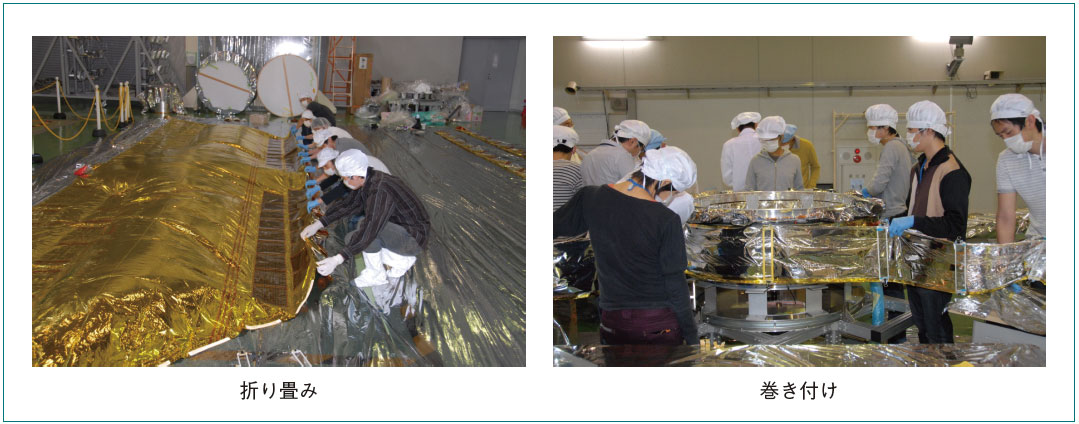
図6 学生によるセイル作業
3.2 本体とセイル
IKAROSの質量は全体で308kg(セイル15kgを含む)である。図7にIKAROSの本体とセイルを示す。IKAROSの本体は直径1.6m、高さ0.8mの円柱形であり、打ち上げ時には本体側面にセイルが巻き付けられている。
セイルの膜面は1辺14m(差し渡し20m)の正方形であり、厚さはわずか7.5μmである。膜材には宇宙環境にも耐えられるポリイミド樹脂を採用し、表面(太陽面)には太陽光を反射するようアルミニウムが蒸着してある。膜面には亀裂の進展を防止するために補強処理が施してある。ポリイミド樹脂を接着で貼り合わせる場合、接着剤のアウトガス、耐宇宙環境性能、質量、厚さ等が問題となるため、熱融着可能なポリイミド樹脂も新たに開発し、膜面の一部に取り入れた。膜面には厚さ25μmのa-Si(アモルファスシリコン)セルの薄膜太陽電池以外に液晶デバイス、ダストカウンタ等も貼り付けられている。膜面と本体はテザーとハーネスで機械的・電気的に結合されており、膜面は遠心力によって展開・展張する。これをサポートするため、膜面の各頂点にはそれぞれ0.5kgの先端マスが取り付けられている。
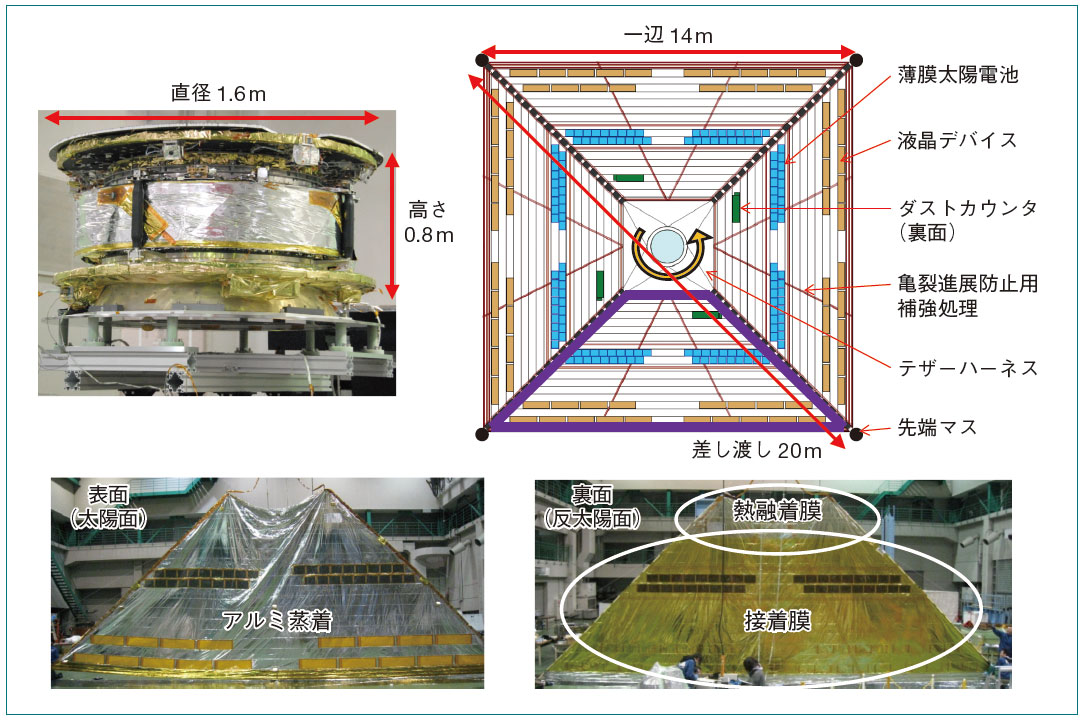
図7 本体とセイル
3.3 展開システム
図8にIKAROSの膜面の展開手順を示す。IKAROSはスピンの遠心力を用いて膜面を展開する。膜面展開は主に、(1)先端マス解放、(2)一次展開、(3)二次展開の3つのプロセスに分けられる(いずれのプロセスにおいても、角運動量保存によりスピンレートは低下する)。
(1)4つの先端マスの拘束を同時に解放する。このとき、先端マスが本体に衝突しないよう事前に十分スピンダウンしておく。
(2)本体の側面に巻き付けられた膜面を解きながら展開する。ただし、一気に展開すると姿勢を乱すため、回転ガイドで膜面の根元を押さえ、本体に対してゆっくりと相対回転することで、準静的に膜面を繰り出す。このとき、膜面が回転ガイドに引っかからず引き出されるよう事前に十分スピンアップしておく。一次展開終了時には、膜面は十字の形状となる。
(3)4本の回転ガイドを同時に倒して、膜面の拘束を解放し一気に膜面を展開する。このとき振動が発生するが、しばらくすると減衰して、膜面は正方形の展張状態となる。
図9に示すようにIKAROSは膜面の展開・展張状態を把握するためにモニタカメラおよび分離カメラを搭載している。モニタカメラは水平画角90deg以上の広角レンズを採用し、4台のカメラヘッドで360degの視野を持つよう構成されている。分離カメラは、それぞれ直径55mm、高さ約60mmの超小型カメラであり、本体から放出されて、離れた視点から撮像したデータをIKAROS本体に無線で伝送する。宇宙空間にて宇宙機自身の全景写真を撮るシステムは世界でも初の試みであり、大型宇宙構造物はもちろん不具合時の宇宙機の状態確認等にも広く応用できる。はやぶさ2にも分離カメラが搭載され、小惑星爆破時の撮影に用いられる予定である。
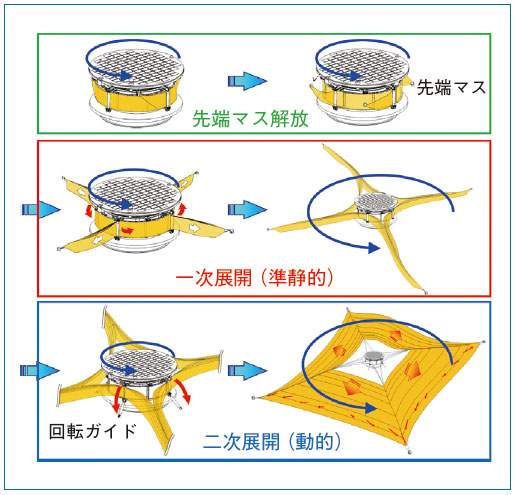
図8 膜面展開手順
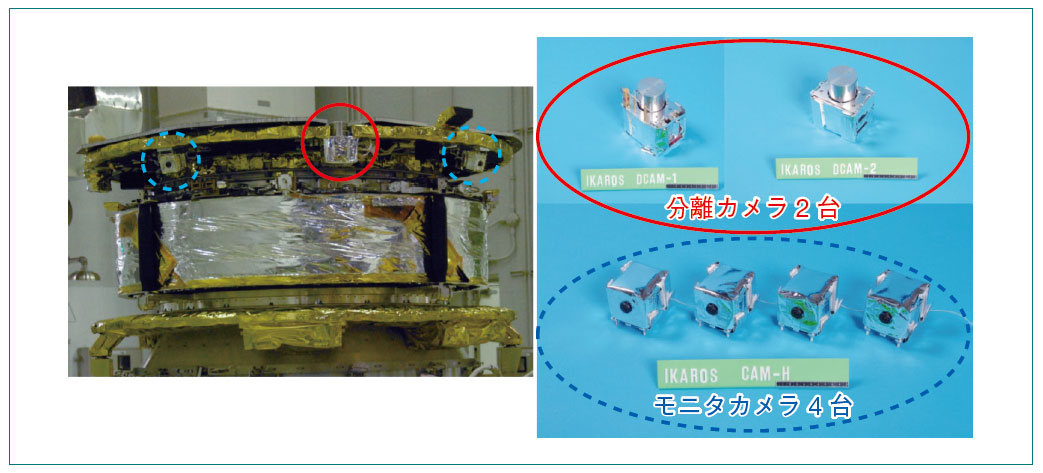
図9 モニタカメラと分離カメラ
3.4 姿勢制御システム
図10にソーラーセイルによる軌道制御の原理を示す。ソーラーセイルは太陽光により受ける力の向きによって加速または減速し、加速時には太陽から遠ざかり、減速時には太陽に近づく。よって、セイルの方向を調整することで軌道を制御できる。ここでスピン状態にある大型膜面をどうやって方向制御するかが課題となる。IKAROSでは、推進系を用いる方法と液晶デバイスを用いる方法の2つを実証した。
IKAROSの本体には、推進系として新規開発品の気液平衡スラスタが搭載されている。これは推進薬を液体として貯蔵し、気体として噴射するコールドガススラスタシステムである。推進薬はHFC-134a(代替フロン)を採用した。燃料が不燃かつ無毒で高圧部がないことから、射場作業時等地上での安全上の取り扱いが比較的簡単であり、ピギーバック方式の打ち上げに適したシステムと言える。一方、気液平衡スラスタは連続噴射に制約がある。IKAROSでは柔軟構造物である膜面の振動を励起させないよう十分注意しながら、パルス噴射を繰り返すことで、本体を姿勢制御し、セイルの方向を制御した。
IKAROSのセイル端部には、姿勢制御システムとして液晶デバイスが貼り付けられている。図11のように電気的に光学特性(鏡面反射率/拡散反射率/吸収率)を変化させることでセイル端部に印加される太陽光圧が不均一となり、姿勢制御トルクが発生する。本デバイスは太陽光圧という微小でかつ持続的に作用する力を用いてトルクを発生させるため、インパルス的なトルクによって膜面の振動を励起することがなく、燃料も消費しないという点で有利である。
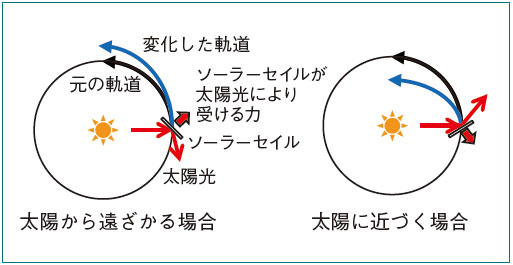
図10 ソーラーセイルによる軌道制御の原理
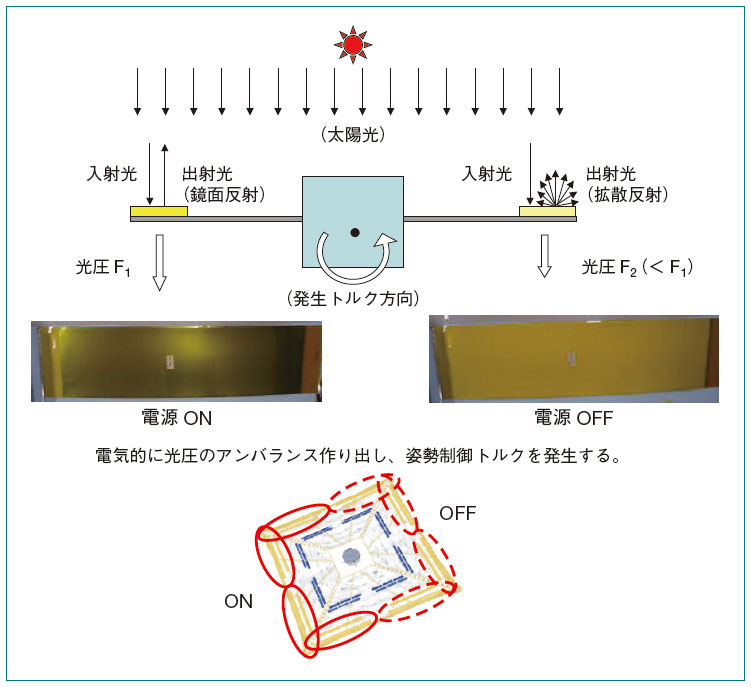
図11 液晶デバイスの動作原理
4 IKAROSの運用
4.1 大型膜面の展開・展張
表1に大型膜面の展開・展張に関する運用実績、図12にモニタカメラ画像とセイル状態予想図を示す。先端マス解放後のモニタカメラ画像から先端マスが正常に本体から切り離されたことが分かる。一次展開は回転ガイドを少しずつ駆動して実施した。モニタカメラ画像から膜面が少しずつ繰り出され、最終的に膜面が十字形状になっていることが分かる。二次展開は回転ガイドを解放して実施した。モニタカメラ画像は膜面が回転ガイドに引っかかることなく展開できていることを示している。
図13に本体の角速度のデータを示す。スピン軸はz軸となる。先端マス解放後は、図13(a)を見ると角運動量保存によりz軸の角速度が低下しているが、一方でx、y軸の角速度が0のままであることからニューテーション(首振り運動)は発生しておらず、4つの先端マスがすべて同時に解放されたと考えられる。二次展開では図13(b)のようにx、y、z軸の角速度のデータから、膜面を一気に展開したことで、ニューテーションが発生していることが分かる(数時間後には減衰した)。
膜面展開後に分離カメラによる全景連続撮影を2回行った。図14に分離カメラの画像データを示す。膜面に大きな破損がなく、正方形に展張していることが確認できた。2回目には液晶デバイスの動作確認も行った。ON(鏡面反射)状態の液晶デバイスは暗く写り、OFF(拡散反射)状態の液晶デバイスは少し明るめに写っている。なお、本撮影時にはON/OFFが交互に並ぶよう制御しており、実際の姿勢制御時のON/OFF状態とは異なっている。
表1 大型膜面の展開・展張に関する運用実績
| 2010年5月21日 | 打ち上げ,スピン分離(5rpm) |
| 2010年5月24日~25日 | スピンダウン(2rpm) |
| 2010年5月26日 | 先端マス解放 |
| 2010年5月27日~31日 | スピンアップ(25rpm) |
| 2010年6月02日~08日 | 一次展開(5rpm) |
| 2010年6月09日 | 二次展開(2.5rpm) |
| 2010年6月14日 | 分離カメラ1 回目の撮像実験 |
| 2010年6月16日 | スピンダウン(1rpm) |
| 2010年6月19日 | 分離カメラ2 回目の撮像実験 |
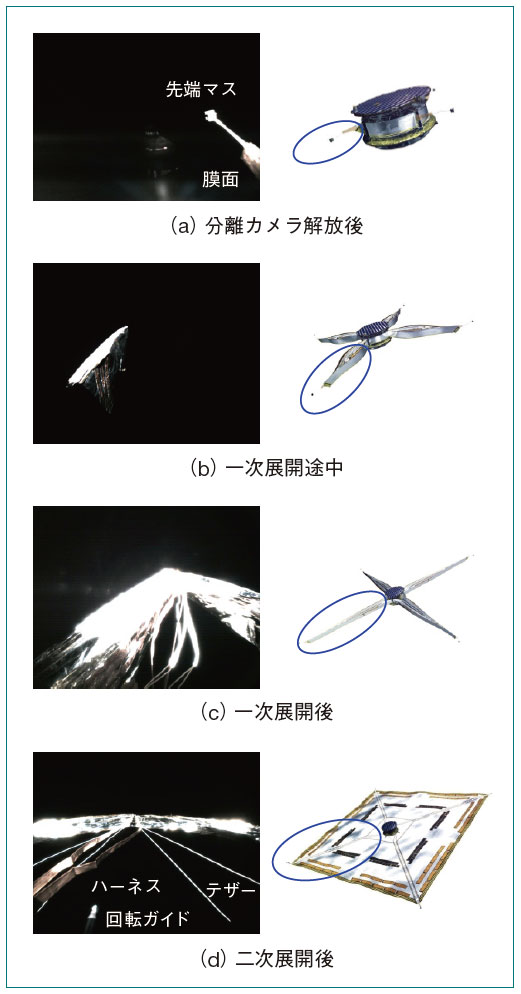
図12 モニタカメラ画像とセイル状態予想図
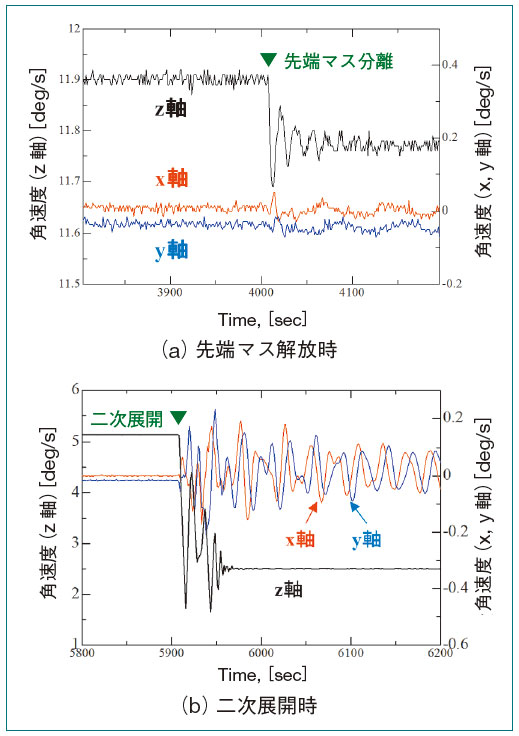
図13 本体の角速度
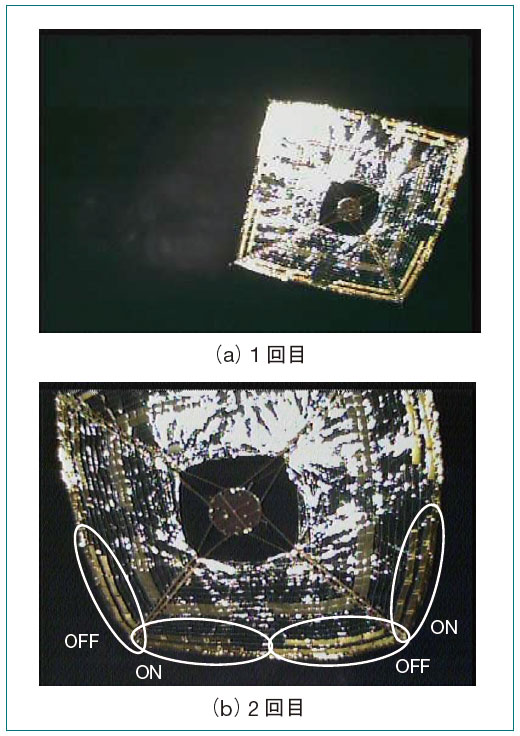
図14 分離カメラ画像
4.2 ソーラーセイルによる航行
膜面展開前後のドップラーの変化から太陽光圧による推力を算出した結果、1.1mNとなり設計値とほぼ一致した(図15)。これにより世界初のソーラーセイルが実証された。その後は軌道決定により太陽距離・太陽角が異なる条件で太陽光圧による推力を評価した。2010年11月までに累積加速量は100m/sとなった。
並行して、スラスタや液晶デバイスを用いてセイルの方向を調整し、軌道制御も行った。図16に液晶デバイスで太陽指向制御を行った場合の結果を示す。太陽角の変化から想定通りの制御性能が達成されていることが確認できた。
IKAROSは2010年12月8日に金星からおよそ8万kmの距離をフライバイした。このときにモニタカメラで金星の撮像にも成功し、世界初のソーラーセイルによるフライバイ観測も達成した(図17)。なお、IKAROSはソーラーセイルにより減速したため、金星最接近が「あかつき」よりも1日遅くなった。
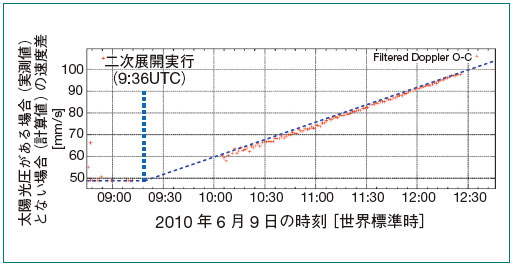
図15 膜面展開時のドップラー履歴
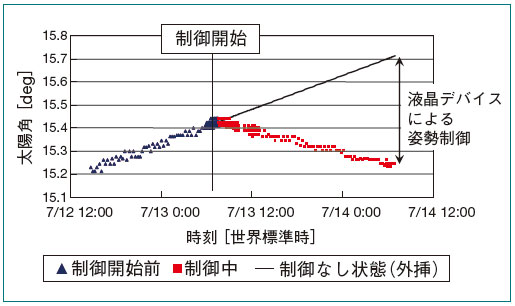
図16 液晶デバイスによる太陽指向制御
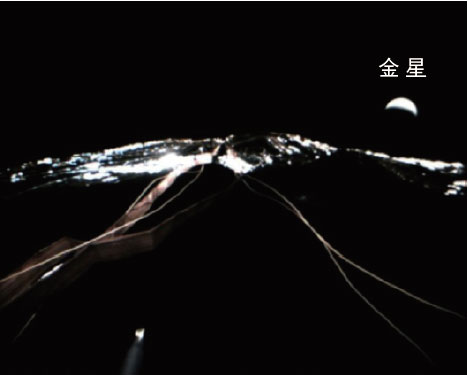
図17 金星フライバイ観測
5 外惑星領域探査計画
5.1 システムとミッションの概要
IKAROSの成果を踏まえ、本計画で開発するソーラー電力セイル探査機の概要を図18に示す。超大型セイル(面積:2000~3000m2、IKAROSの10~15倍)で光子加速するだけでなく、高比推力イオンエンジン(比推力:6000~9000秒、はやぶさの2~3倍)も駆動し、外惑星領域で大きな増速量を達成する。また、セイル全体に薄膜太陽電池を貼り付け、外惑星領域で大電力を確保する。
ミッションシーケンスを図19に示す。本探査機はEDVEGAおよび木星スイングバイを併用して、太陽木星系のラグランジュ点付近に存在するトロヤ群小惑星領域に世界で初めて到達する。トロヤ群小惑星では、子機を切り離して着陸し、サンプル採取・分析を行う。ここまでをフルサクセスとする。さらに、エクストラサクセスとして、子機が親機にサンプルを引き渡し、親機は小惑星帯以遠のダストも採取して、木星経由で地球へ帰還する。目標天体を2005EL140とし、2022年に打ち上げた場合の例を以下に示す。
2024年8月12日:地球スイングバイ
2028年1月1日:木星スイングバイ
2037年9月13日:2005EL140到着
2038年9月21日:2005EL140出発
2051年7月9日:木星スイングバイ
2053年8月21日:地球帰還
本計画では深宇宙空間での巡航飛行環境を利用した複数の天文科学観測を行うことも大きな特徴であり、(1)赤外線背景放射の掃天観測、(2)黄道光の立体的観測・分光観測、(3)太陽系ダスト分布のその場計測、(4)ガンマ線バーストの偏光観測、(5)小惑星帯における小惑星フライバイ観測、(6)木星磁気圏観測などを行う。なお、IKAROSではオプション機器(ALADDIN、GAP)を用いて、(3)、(4)の事前検証を実施した。
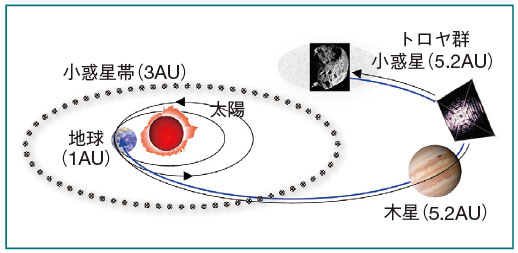
図18 ソーラー電力セイル探査機
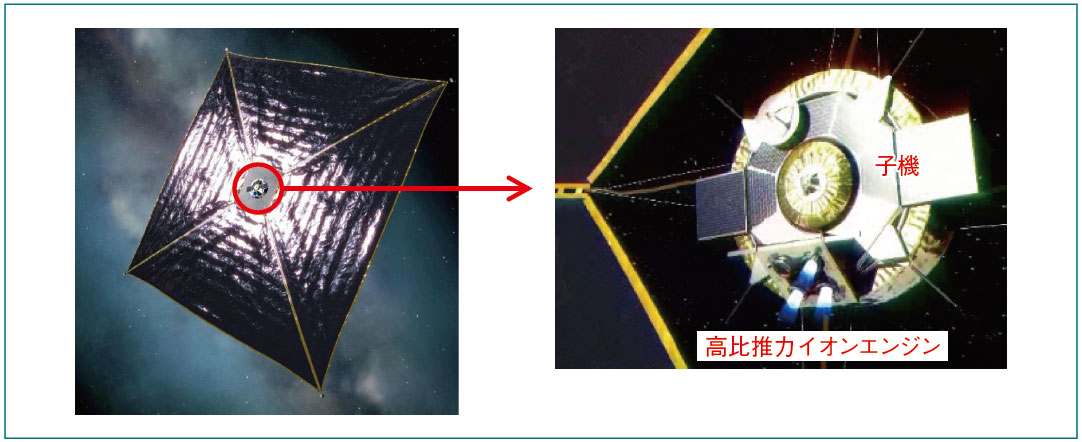
図19 ミッションシーケンス
5.2 工学的目標と理学的目標
本計画で実証する探査技術を図20に示す。ソーラー電力セイル技術だけでなく、今後の深宇宙探査(特に外惑星領域探査)に必須となる技術も併せて実証する。宇宙分野以外の技術にも貢献でき、大型膜構造物の展開・展張は座屈管理した大型建造物へ、薄膜太陽電池は低価格電池の大量生産へ応用が可能である。
理学的目標としては、トロヤ群小惑星を探査し、太陽系形成論における巨大惑星の軌道移動の解明に挑む。また、深宇宙空間での巡航飛行環境を利用し、太陽系ダストの空間分布や黄道光の分光を測定することで、小惑星帯・短周期彗星・カイパーベルト帯などからのダストの生成率や軌道進化に関する理解を深めると同時に、黄道光散乱の影響が少ない小惑星帯以遠から宇宙赤外線背景放射観測を行うことで、宇宙創成初期に形成された第一世代の星を調べる(赤外線背景放射は小惑星帯を主たる起源とする黄道面ダストによって、地球近傍の観測では従来遮られてきた)。また、探査機地球間の距離を利用してガンマ線バーストの発生方向を精度よく特定した観測を行うこともできる。欧米露が2020年代後半に実現を目指している国際共同木星圏探査ミッションに対しては、木星フライバイ時に同時観測を行い一翼を担う。いずれも、未だ実現されたことのない第一級の科学観測ミッションであり、太陽系科学、天文学、宇宙物理学の大きな進展に寄与する。
本計画で目指す世界初・世界最高として、(1)世界初の光子推進と電気推進のハイブリッド推進、(2)世界最高性能のイオンエンジン、(3)世界初の外惑星領域往復、(4)世界最高速度の地球帰還カプセル、(5)世界初の小惑星帯以遠での赤外背景放射観測、(6)世界初のトロヤ群小惑星探査、(7)世界初のトロヤ群小惑星サンプル採取、(8)世界初の小惑星帯以遠のダスト採取、が挙げられる。本計画では、日本独自の外惑星領域探査技術を確立することで、日本が太陽系探査を先導し、新しい科学分野であるスペース天文学等を切り拓くことを目標とする。
| 大型膜構造物の展開・展張 | → | 大型化(2000~3000 m2)、熱融着膜化、シングルスピン方式 |
| 薄膜太陽電池システム | → | 大電力化(5 kW@5.2 AU)、CIGS の採用、反り防止 |
| 姿勢制御デバイス | → | 耐宇宙環境性向上、長寿命化 |
| 低推力推進系による軌道操作 | → | 光子推進と電気推進のハイブリッド航行 |
| 高比推力イオンエンジン | → | 高比推力化(6000~9000 秒)、長寿命化(40000 時間) |
| 低温2 液推進機関 | → | 低温動作(-50℃でも使用可) |
| USO・ΔVLBI 軌道決定・航法 | → | 遠距離高精度軌道決定技術 |
| サンプル採取 | → | 子機によるサンプリング、その場分析、親機への引き渡し |
| ランデブー・ドッキング | → | 子機の航法誘導制御,RF センサー |
| 超高速リエントリー | → | 高速化(再突入速度:13~15 km/s、Vinf:10 km/s)、軽量化 |
| 膜面フェーズドアレーアンテナ | → | X 帯以上の送受信、レトロディレクティブ機能(オプション) |
| 推進系統合型燃料電池 | → | 子機の推進系&電源系の軽量化(オプション) |
図20 技術実証項目
6 おわりに
本稿では、IKAROSのミッション・システムを紹介し、開発・運用の概要を報告した。IKAROSは、2010年5月21日に打ち上げられ、世界初のソーラーセイルおよびソーラー電力セイルの実証に成功した。2014年10月現在も運用を継続し、ソーラー電力セイルの基盤となるデータを取得し続けている。
本稿では、次のソーラー電力セイルミッションとして検討中の外惑星領域探査計画についても述べた。ソーラー電力セイルは探査機における燃料・電力の制約を大幅に緩和し「より遠く、より自在な」探査活動を可能とする。この点においてIKAROSは「太陽系大航海時代」を切り拓いたと言える。